Cluster-GCN:超大图上的节点特征学习
Cluster-GCN:超大图上的节点特征学习
引言
基于图卷积设计的图神经网络在非结构化数据上表现优良,但仍然面临一些困难,如:
- 在超大图上进行图神经网络的训练时,全图的图卷积操作和full-batch的梯度下降方式,每个epoch中同时对所有节点更新embedding需要大量的内存空间(空间复杂度高);
- 基于图卷积操作的图神经网络结构,随着层数增加,计算成本指数增加(时间复杂度高),过多层的图神经网络模型还存在输出节点特征过平滑的特点;
- full-batch算法收敛性较差。
现有应对方案
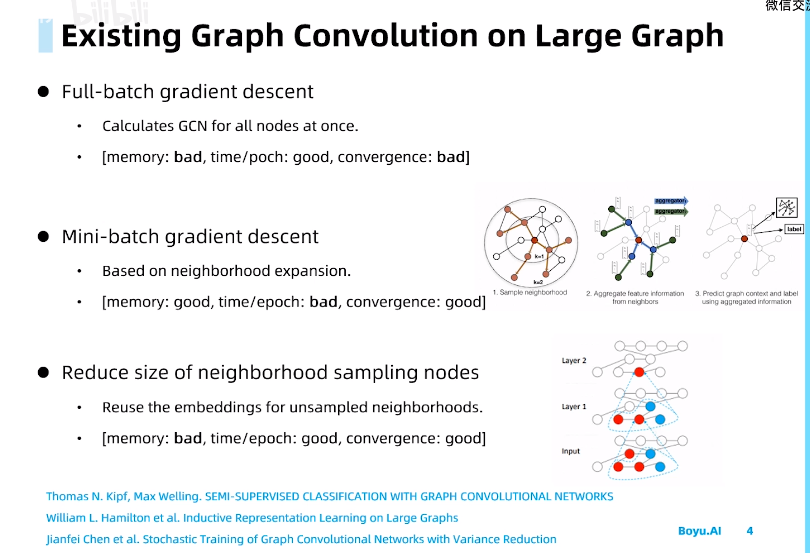
针对空间复杂度高的问题,有学者提出基于mini-batch的梯度下降方式减小模型的内存需求。
如GraphSAGE模型,该方法对节点周围k步的邻居进行采样,由于采样的邻居数小于full-batch,空间复杂度较小;然而由于需要更新节点embedding需要考虑邻居节点,随着GCN层数提升,计算量指数级增加,时间复杂度高。但该方法可以选取合适的batchsize,收敛性相对full-batch好一些;
而针对mini-batch中时间复杂度高的问题,有学者提出VR-GCN模型,该模型保存之前sample时计算过的节点的embedding,可以降低时间复杂度,但需要存储sample过的节点的embedding,空间复杂度又相对变得很高。
Cluster-GCN
针对以上方案解决图神经网面对困难的不足,论文Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Network提出了一种新的图神经网络的训练方法。其目标在于:优化图卷积网络的计算方式,能在大型图上训练更深的GCN,并能比较好收敛,提升性能(较低的时间、空间复杂度+较好的收敛)。
根据对问题的分析和现有方案解决问题存在的不足,逐步分析问题并提出相应的解决思路。
为什么mini-batch的方法时间复杂度高?
基于mini-batch的方法在参数更新中,不需要计算完整梯度,只需要计算每个batch的梯度。使用\(\mathcal{B} \subseteq[N]\)来表示一个batch,其大小为\(b=|\mathcal{B}|\)。SGD的每一步都将计算梯度估计值\(\frac{1}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \nabla \operatorname{loss}\left(y_{i}, z_{i}^{(L)}\right)\)来进行参数更新。尽管在epoches数量相同的情况下,采用SGD方式进行训练,收敛速度可以更快,但此种训练方式会每个epoch引入额外的时间开销。
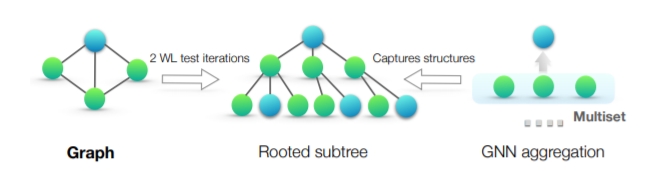
将节点\(i\)的梯度的计算表示为\(\nabla \operatorname{loss}\left(y_{i}, z_{i}^{(L)}\right)\),它依赖于节点\(i\)的\(L\)层的表征,而节点\(i\)的非第\(0\)层的表征都依赖于各自邻接节点在前一层的表征(邻域扩展)。假设一个图神经网络有\(L+1\)层,节点的平均的度为\(d\)。为了得到节点\(i\)的梯度,均我需要聚合图上\(O\left(d^{L}\right)\)的节点的表征。也就是说,我们需要获取节点的距离为\(k(k=1, \cdots, L)\)的邻接节点的信息来进行一次参数更新。由于要与权重矩阵\(W^{(l)}\)相乘,所以计算任意节点表征的时间开销是\(O\left(F^{2}\right)\)。所以平均来说,一个节点的梯度的计算需要\(O\left(d^{L} F^{2}\right)\)的时间。
为了反映mini-batch SGD的计算效率,Cluster-GCN论文提出了"表征利用率"的概念来描述计算效率。在训练过程中,如果节点\(i\)在\(l\)层的表征\(z_{i}^{(l)}\)被计算并在\(l+1\)层的表征计算中被重复使用\(u\)次,那么\(z_{i}^{(l)}\)的表征利用率为\(u\)。一个batch有多个节点,不同的节点同样距离远的邻接节点可以是重叠的,于是计算表征的次数可以小于最坏的情况\(O\left(b d^{L}\right)\)。对于随机抽样的mini-batch SGD,\(u\)非常小,因为图通常是大且稀疏的。假设\(u\)是一个小常数(节点间同样距离的邻接节点重叠率小),那么mini-batch SGD的训练方式对每个batch需要计算\(O\left(b d^{L}\right)\)的表征,于是每次参数更新需要\(O\left(b d^{L} F^{2}\right)\)的时间,每个epoch需要\(O\left(N d^{L} F^{2}\right)\)的时间。
基于full-batch梯度下降的方法具有最大的表征利用率(时间复杂度较低)——每个节点表征将在上一层被重复使用平均节点度次。因此,全梯度下降法在每个epoch中只需要计算\(O(N L)\)的表征,这意味着平均下来只需要\(O(L)\)的表征计算就可以获得一个节点的梯度。
因此,解决的问题转化为:
能否找到一种将节点分成多个batch的方式,对应地将图划分成多个子图,使得表征利用率最大?
为了最大限度地提高表征利用率,理想的划分batch的结果是,batch内的边尽可能多,batch之间的边尽可能少。
由此引入图聚类算法提出解决策略1:
解决策略1——每个聚类簇作为一个batch
其基本思路为:
- 利用图节点聚类算法将一个图的节点划分为\(c\)个簇,每一次选择几个簇的节点和这些节点对应的边构成一个子图,然后对子图做训练。
- 由于是利用图节点聚类算法将节点划分为多个簇,所以簇内边的数量要比簇间边的数量多得多,所以可以提高表征利用率,并提高图神经网络的训练效率。
对于一个图\(G\),我们将其节点划分为\(c\)个簇:\(\mathcal{V}=\left[\mathcal{V}_{1}, \cdots \mathcal{V}_{c}\right]\),其中\(\mathcal{V}_{t}\)由第\(t\)个簇中的节点组成,对应的我们有\(c\)个子图: \[ \bar{G}=\left[G_{1}, \cdots, G_{c}\right]=\left[\left\{\mathcal{V}_{1}, \mathcal{E}_{1}\right\}, \cdots,\left\{\mathcal{V}_{c}, \mathcal{E}_{c}\right\}\right] \notag \] 其中\(\mathcal{E}_{t}\)只由\(\mathcal{V}_{t}\)中的节点之间的边组成。经过节点重组,邻接矩阵被划分为大小为\(c^{2}\)的块矩阵,如下所示 \[ A=\bar{A}+\Delta=\left[\begin{array}{ccc} A_{11} & \cdots & A_{1 c} \\ \vdots & \ddots & \vdots \\ A_{c 1} & \cdots & A_{c c} \end{array}\right] \tag{1} \] 其中, \[ \bar{A}=\left[\begin{array}{ccc} A_{11} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & A_{c c} \end{array}\right], \Delta=\left[\begin{array}{ccc} 0 & \cdots & A_{1 c} \\ \vdots & \ddots & \vdots \\ A_{c 1} & \cdots & 0 \end{array}\right] \tag{2} \] 其中,对角线上的块\(A_{t t}\)是大小为\(\left|\mathcal{V}_{t}\right| \times\left|\mathcal{V}_{t}\right|\)的邻接矩阵,它由\(G_{t}\)内部的边构成。\(\bar{A}\)是图\(\bar{G}\)的邻接矩阵。\(A_{s t}\)由两个簇\(\mathcal{V}_{s}\)和\(\mathcal{V}_{t}\)之间的边构成。\(\Delta\)是由\(A\)的所有非对角线块组成的矩阵。同样,我们可以根据\(\left[\mathcal{V}_{1}, \cdots, \mathcal{V}_{c}\right]\)划分节点表征矩阵\(X\)和类别向量\(Y\),得到\(\left[X_{1}, \cdots, X_{c}\right]\)和\(\left[Y_{1}, \cdots, Y_{c}\right]\),其中\(X_{t}\)和\(Y_{t}\)分别由\(V_{t}\)中节点的表征和类别组成。
用块对角线邻接矩阵\(\bar{A}\)去近似邻接矩阵\(A\),这样做的好处是,完整的损失函数(公示(2))可以根据batch分解成多个部分之和。
以\(\bar{A}^{\prime}\)表示归一化后的\(\bar{A}\),单层卷积过程: \[ X^{(l+1)}=\sigma\left(A^{\prime} X^{(l)} W^{(l)}\right)\tag{3} \] 经过多层卷积后,最后一层节点表征矩阵可以做如下的分解: \[ \begin{aligned} Z^{(L)} &=\bar{A}^{\prime} \sigma\left(\bar{A}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}^{\prime} X W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)} \\ &=\left[\begin{array}{c} \bar{A}_{11}^{\prime} \sigma\left(\bar{A}_{11}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}_{11}^{\prime} X_{1} W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)} \\ \vdots \\ \bar{A}_{c c}^{\prime} \sigma\left(\bar{A}_{c c}^{\prime} \sigma\left(\cdots \sigma\left(\bar{A}_{c c}^{\prime} X_{c} W^{(0)}\right) W^{(1)}\right) \cdots\right) W^{(L-1)} \end{array}\right] \end{aligned} \tag{4} \] 由于\(\bar{A}\)是块对角形式(\(\bar{A}_{t t}^{\prime}\)是\(\bar{A}^{\prime}\)的对角线上的块),于是损失函数可以分解为 \[ \begin{aligned}\mathcal{L}_{\bar{A}^{\prime}}=\sum_{t} \frac{\left|\mathcal{V}_{t}\right|}{N} \mathcal{L}_{\bar{A}_{tt}^{\prime}} \text {and} \mathcal{L}_{\bar{A}_{tt}^{\prime}}=\frac{1}{\left|\mathcal{V}_{t}\right|} \sum_{i \in \mathcal{V}_{t}} \operatorname{loss}\left(y_{i}, z_{i}^{(L)}\right)\end{aligned} \tag{5} \]
基于公式(4)和公式(5),在训练的每一步中,Cluster-GCN首先采样一个簇\(\mathcal{V}_{t}\),然后根据\(\mathcal{L}_{\bar{A}_{tt}^{\prime}}\) 的梯度进行参数更新。这种训练方式,只需要用到子图\(A_{t t}\), \(X_{t}\), \(Y_{t}\)以及神经网络权重矩阵\(\{W^{(l)}\}_{l=1}^{L}\)。 实际中,主要的计算开销在神经网络前向过程中的矩阵乘法运算(公式(4)的一个行)和梯度反向传播。
论文利用图聚类算法构建batch的方法和随机采样节点构建batch的方法进行对比,结果表明聚类分区得到更好的性能(就测试F1集得分而言)。
| Dataset | random partition | clustering partition |
|---|---|---|
| Cora | 78.4 | 82.5 |
| Pubmed | 78.9 | 79.9 |
| PPI | 68.1 | 92.9 |
解决策略1(将聚类簇作为batch)还存在什么问题?
上述利用图聚类算法构建batch的策略还存在以下两个问题:
- 图被分割后,一些边(公式(2)中的\(\Delta\)部分)被移除,即,丢失了聚类簇之间的连边信息,性能可能因此会受到影响。
- 图聚类算法倾向于将相似的节点聚集在一起。因此,单个簇中节点的类别分布可能与原始数据集不同,且不同batch的分布差别很大,导致对梯度的估计有偏差。
图2展示了一个类别分布不平衡的例子,该例子使用Reddit数据集,节点聚类由Metis软件包实现。根据各个簇的类别分布来计算熵值。与随机划分相比,采用聚类划分得到的大多数簇熵值都很小,簇熵值小表明簇中节点的标签分布偏向于某一些类别,这意味着不同簇的标签分布有较大的差异,这将影响训练的收敛。
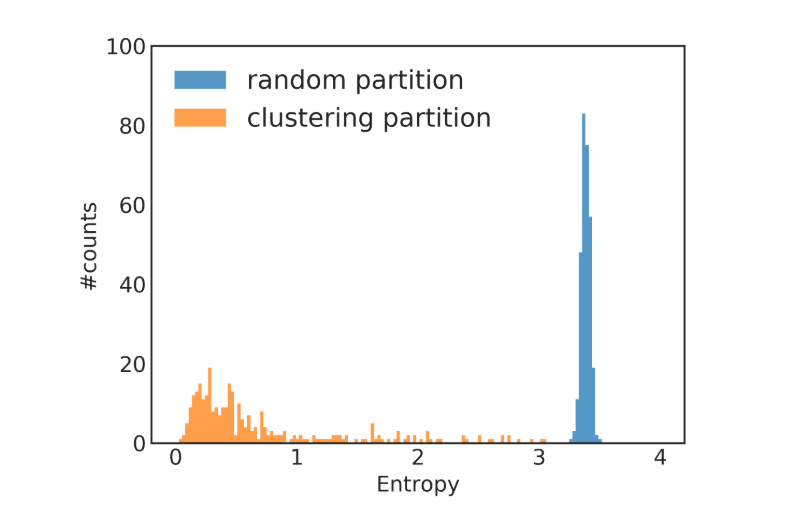
[^]: 图2:类别分布熵值柱状图。类别分布熵越高意味着簇内类别分布越平衡,反之意味着簇内类别分布越不平衡。此图展示了不同熵值的随机分区和聚类分区的簇的数量,大多数聚类分区的簇具有较低的熵,表明各个簇内节点的类别分布存在偏差。相比之下,随机分区会产生类别分布熵很高的簇,尽管基于随机分区的训练的效率较低。在这个例子中,使用了Reddit数据集,进行了300个簇的分区。
解决策略2——随机分区聚类簇作为batch
为了解决上面两个问题,进一步使用分区的概念,提出一种随机多聚类方法,随机选择多个簇作为一个分区,以分区为单位作为一个batch,减少batch间的差异(variance)。
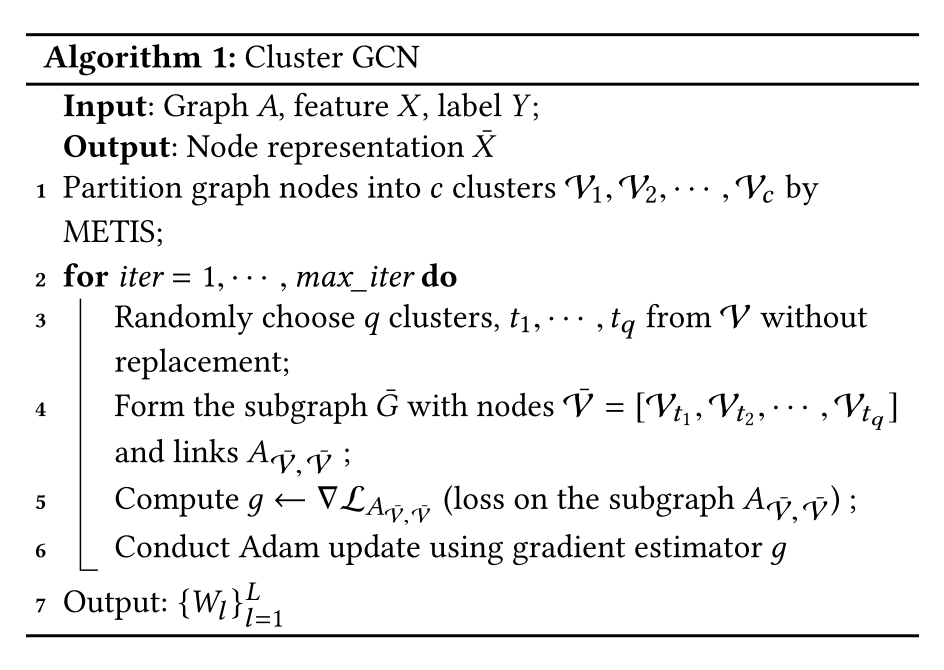
此方法首先将图划分为\(p\)个簇,\(\mathcal{V}_{1}, \cdots, \mathcal{V}_{p}\),\(p\)是一个较大的值,在构建一个batch时,不是只使用一个簇,而是使用随机选择的\(q\)个簇合并到一个区,表示为\(t_{1}, \ldots, t_{q}\),恢复区内各个cluster间的连边,以分区作为batch,其中包含节点\(\left\{\mathcal{V}_{t_{1}} \cup \cdots \cup \mathcal{V}_{t_{q}}\right\}\) 、簇内边\(\left\{A_{i i} \mid i \in t_{1}, \ldots, t_{q}\right\}\)和簇间边\(\left\{A_{i j} \mid i, j \in t_{1}, \ldots, t_{q}\right\}\)。此方法的好处有,1)不会丢失簇间的边,2)不会有很大的batch内类别分布的偏差,3)以及不同的epoch使用的batch不同,这可以降低梯度估计的偏差,4)基于小图进行训练,不会消耗很多内存空间,且于是可以尝试训练更深的神经网络。
图3展示了随机多簇方法,在每个epoch中,随机选择一些簇来组成一个batch,不同的epoch的batch不同。在图4中,可以观察到,使用多个簇来组成一个batch可以提高收敛性。最终的Cluster-GCN算法在算法1中呈现。
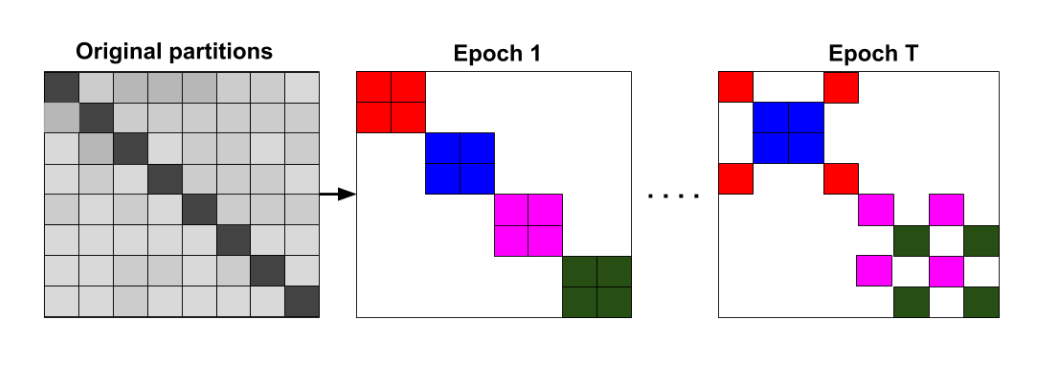
[^]: 图3:Cluster-GCN提出的随机多分区方法。在每个epoch中,我们(不放回地)随机抽取\(q\)个簇(本例中使用\(q\)=2)及其簇间的边,来构成一个batch(相同颜色的块在同一batch中)。
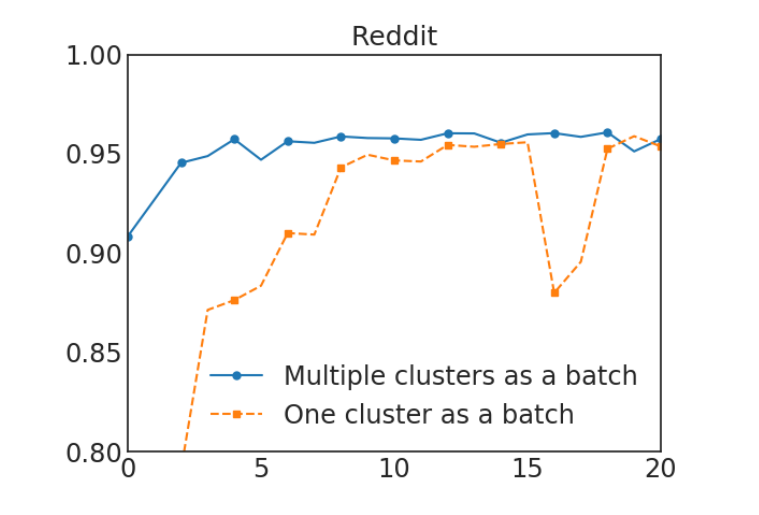
[^]: 图4:选择一个簇与选择多个簇的比较。前者使用300个簇。后者使用1500个簇,并随机选择5个簇来组成一个batch。该图X轴为epoches,Y轴为F1得分。
如何解决深层GCNs的问题?
与其他神经网络增加卷积层数可能会带来比较大的效果提升不同,以往尝试训练更深的GCN的研究似乎表明,增加更多的层是没有帮助的。比如由于节点数量过少,过深的层很容易出现过拟合的问题。此外,加深GCN神经网络层数后,训练变得很困难,因为层数多了之后前面的信息可能无法传到后面。有的研究采用了一种类似于残差连接的技术,使模型能够将前一层的信息直接传到下一层。具体来说,他们修改了公式(3),将第\(l\)层的表征添加到下一层,如下所示: \[ X^{(l+1)}=\sigma\left(A^{\prime} X^{(l)} W^{(l)}\right)+X^{(l)} \tag{6} \]
解决策略——对角增强+标准化
Cluster-GCN论文中提出了另一种简单的技术来改善深层GCN神经网络的训练。在原始的GCN的设置里,每个节点都聚合邻接节点在上一层的表征。Cluster-GCN考虑层的距离,即近距离的邻接节点应该比远距离的的邻接节点贡献更大。其主要思想是放大GCN每一层中使用的邻接矩阵\(A\)的对角线部分。通过这种方式,在GCN的每一层的聚合中对来自上一层的表征赋予更大的权重。这可以通过给\(\bar{A}\)加上一个单位矩阵\(I\)来实现,如下所示, \[ X^{(l+1)}=\sigma\left(\left(A^{\prime}+I\right) X^{(l)} W^{(l)}\right) \tag{7} \] 虽然公式(9)似乎是合理的,但对所有节点使用相同的权重而不考虑其邻居的数量可能不合适。此外,它可能会受到数值不稳定的影响,因为当使用更多的层时,数值会呈指数级增长。因此,Cluster-GCN方法提出了一个修改版的公式(9),以更好地保持邻接节点信息和数值范围。首先给原始的\(A\)添加一个单位矩阵\(I\),并进行归一化处理 \[ \tilde{A}=(D+I)^{-1}(A+I) \tag{8} \] 然后考虑, \[ X^{(l+1)}=\sigma\left((\tilde{A}+\lambda \operatorname{diag}(\tilde{A})) X^{(l)} W^{(l)}\right) \tag{9} \]
其中,\(\lambda\)为超参数。
结果如下:
源码分析
原文中利用了四个数据集(PPI、Reddit、Reddit2、Amazon),我们这里利用较小的Reddit2来进行实验。
数据加载
该数据集包含41个分类任务,232,965个节点,23,213,838条边,节点维度为602维。
from torch_geometric.datasets import Reddit |
图节点聚类与数据加载器生成
cluster_data = ClusterData(data, num_parts=1500, recursive=False, save_dir=dataset.processed_dir) |
cluster_data遵循Cluster-GCN提出的方法,图节点被聚类划分成多个簇并组成多个分区。ClusterData继承于Dataset类,num_parts对应论文中的分区个数;
train_loader为数据加载器返回的一个batch由多个簇组成。ClusterLoader继承于DataLoader类,num_worker表示线程数。
subgraph_loader用于全图的推理阶段,不对图节点聚类,使用所有可用边逐层计算节点特征可以加速计算,而不是立即计算每批的最终表示。
设计Net
卷积层优化——for deeper GCNs
在forward()中,实现对角增强+标准化策略以便可以训练更深层次的GCN网络。
#卷积层优化 |
网络结构
class Net(torch.nn.Module): |
可以看到此神经网络拥有forward和inference两个方法。forward函数的定义与普通的图神经网络并无区别。inference方法应用于推理阶段,为了更快计算,所以使用subgraph_loader。
这里利用nn.ModuleList存储不同的模块,需要注意的是:
nn.ModuleList 并没有定义一个网络,它只是将不同的模块储存在一起,这个 ModuleList 里面的顺序并不能决定什么,网络的执行顺序是根据 forward 函数来决定的。
这不同于 nn.Sequential,里面的模块是按照顺序进行排列的,必须确保前一个模块的输出大小和下一个模块的输入大小是一致的。摘自:PyTorch 中的 ModuleList 和 Sequential: 区别和使用场景
- 补充:
Tqdm 是一个快速,可扩展的Python进度条,可以在 Python 长循环中添加一个进度提示信息,用户只需要封装任意的迭代器 tqdm(iterator)。摘自:tqdm介绍及常用方法_GZKPeng的博客-CSDN博客_tqdm
100%|███████████████████████████████████| 857K/857K [00:04<00:00, 246Kloc/s]
训练、验证与测试
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') |
可见在训练过程中,我们使用train_loader获取batch,每次根据多个簇组成的batch进行神经网络的训练。但在验证阶段,我们使用subgraph_loader,使用所有可用边逐层计算节点特征可以加速计算,而不是立即计算每批的最终表示。
完整代码
总结
Cluster-GCN优化了图卷积网络的计算方式,能在大型图上训练更深的GCN,并能比较好收敛,提升性能(降低空间、时间复杂度且较易收敛),主要包括以下几个方面:
- 通过引入图聚类和随机分区多聚类簇的策略优化基于mini-batch梯度下降方式中batch的选择;(通过ClusterData和ClusterLoader实现)
- 利用对角增强+标准化的策略改善深层GCN神经网络的训练。(通过重写卷积层前向传播函数实现)
参考文献
Cluster-GCN阅读笔记_Zhang Junjian的专栏-CSDN博客
Cluster-GCN: An Efficient Algorithm for Training Deep and Large Graph Convolutional Network