Transformer相关——(6)Normalization方式
Transformer相关——(6)Normalization方式
引言
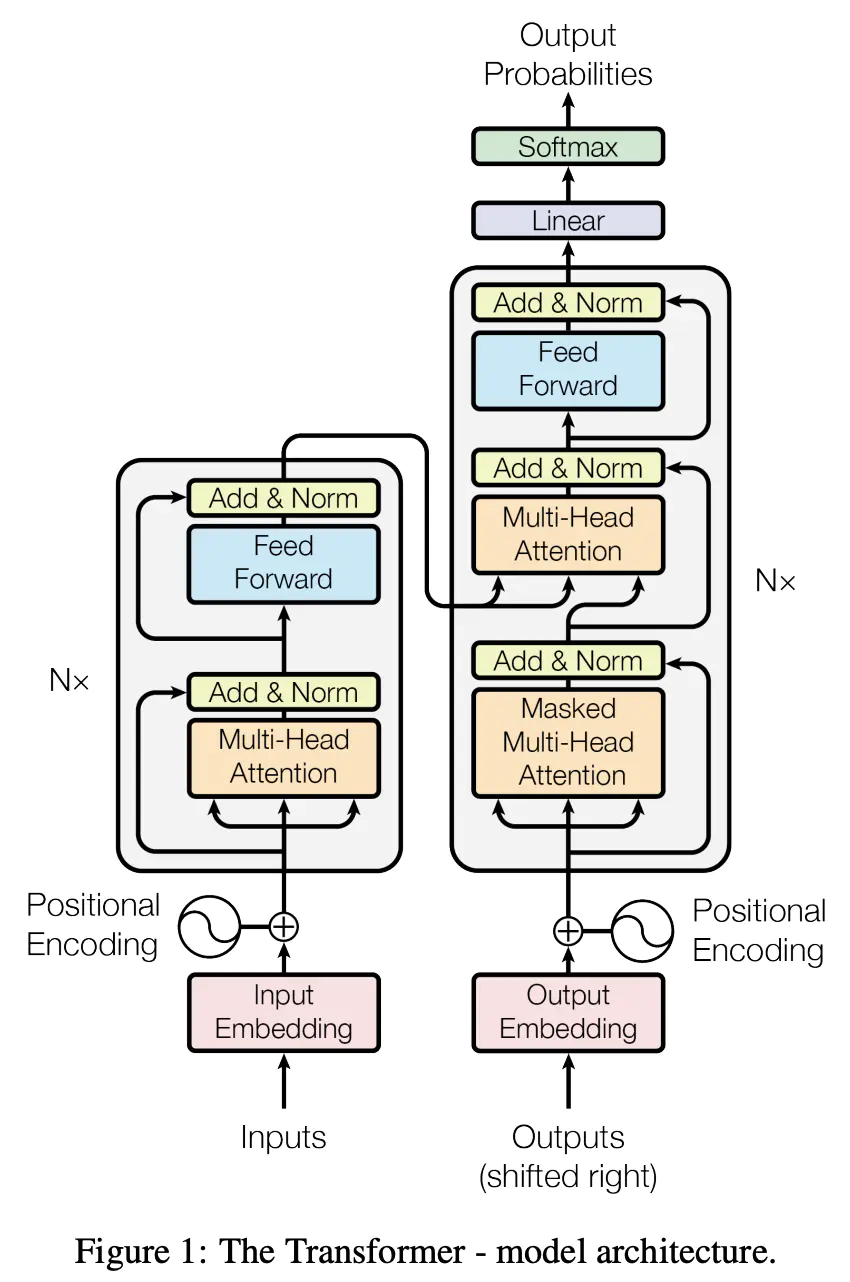
经过了残差模块后,Transformer还对残差模块输出进行了Normalization,本文对Normalization方式进行了总结,并回答为什么Transformer中选择使用Layer Normalization而不是Batch Normalization的问题。
![]()
为什么要做Normalization?
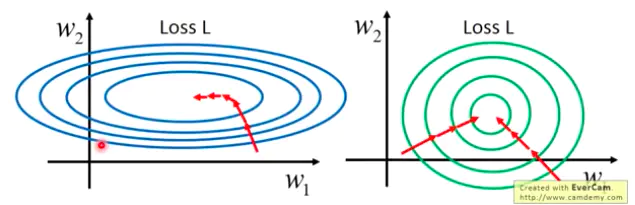
Normalization通过将一部分不重要的信息损失掉,以此来降低拟合难度以及过拟合的风险,从而加速模型收敛。其目的是让分布稳定下来(降低各个维度数据的方差)。
不同的特征具有不同数量级的数据,它们对线性组合后的结果的影响所占比重就很不相同,数量级大的特征显然影响更大。做Normalization可以协调在特征空间上的分布,更好地进行梯度下降;
在神经网络中,特征经过线性组合后,还要经过激活函数,如果某个特征数量级过大,在经过激活函数时,就会提前进入它的饱和区间(比如sigmoid激活函数),即不管如何增大这个数值,它的激活函数值都在 1 附近,不会有太大变化,这样激活函数就对这个特征不敏感。 在神经网络用 SGD 等算法进行优化时,不同量纲的数据会使网络失衡,很不稳定。
Normalization方式
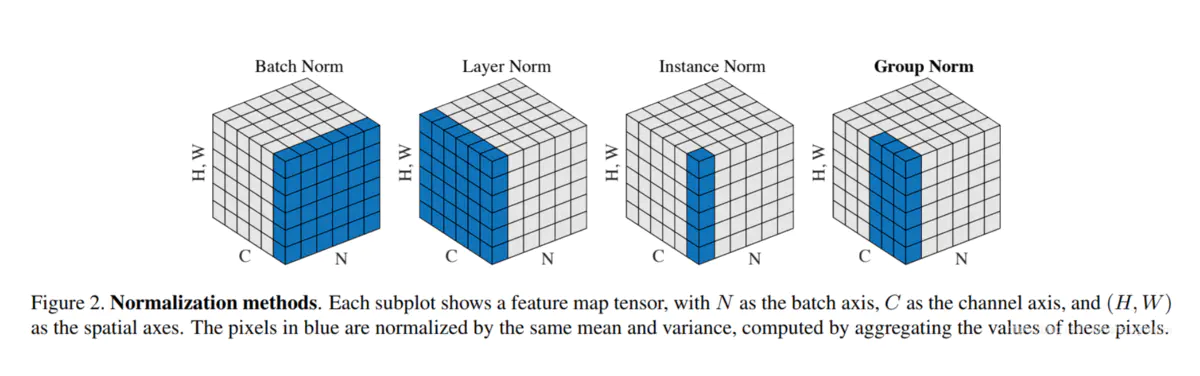
主要包括以下几种方法:BatchNorm(2015年)、LayerNorm(2016年)、InstanceNorm(2016年)、GroupNorm(2018年)。
BatchNorm:batch方向做归一化,算NHW的均值,对小batchsize效果不好;BN主要缺点是对batchsize的大小比较敏感,由于每次计算均值和方差是在一个batch上,所以如果batchsize太小,则计算的均值、方差不足以代表整个数据分布;
LayerNorm:channel方向做归一化,算CHW的均值,主要对RNN作用明显;
InstanceNorm:一个channel内做归一化,算H*W的均值,用在风格化迁移;因为在图像风格化中,生成结果主要依赖于某个图像实例,所以对整个batch归一化不适合图像风格化中,因而对HW做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。
GroupNorm:将channel方向分group,然后每个group内做归一化,算(C//G)HW的均值;这样与batchsize无关,不受其约束。在batchsize<16的时候, 可以使用这种归一化。
SwitchableNorm:将BN、LN、IN结合,赋予权重,让网络自己去学习归一化层应该使用什么方法。
Weight Standardization:权重标准化,2019年约翰霍普金斯大学研究人员提出。
Batch Normalization-BN
针对一个Batch,在同一维度的特征进行feature scaling。
缺点
batch size较小的时候,效果差,因为其原理为用一个batch size的均值方差模拟整个数据分布的均值方差,如果batch size较小,其数据分布与整个数据分布差别较大。
在RNN中表现较差,因为RNN是逐步输入的。

Layer Normalization-LN
单独对一个样本的所有单词作缩放,与batch normalization的方向垂直,对RNN作用明显。
Instance Normalization-IN
一个batch,一个channel内做归一化。用在风格化迁移,因为在图像风格化中,生成结果主要依赖于某个图像实例,所以对整个batch归一化不适合图像风格化中,因而对HW做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。
Group Normalization-GN
将channel方向分group,然后每个group内做归一化。与batchsize无关,不受其约束。
为什么Transformer用Layer Normalization而不是Batch Normalization?
看了一些答案综合总结一下,可以从以下几个角度去解释:
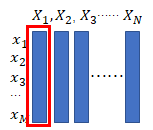
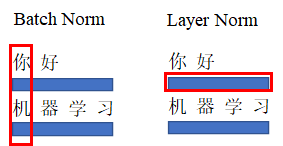
BN是在同一维度进行归一化,但对于一些问题来说,一个序列的输入同一”维度“上的信息可能不是同一个维度。这么说可能有些绕,举一个NLP的例子来看:
下面是一个batch size=2案例,按BN方式,在第一”维度“进行归一化的话就是将”你“和”机“的特征进行归一化,但这明显不是一个维度的信息。显然BN在此处使用是很不合理的。NLP中同一batch样本的信息关联不大(差异很大,但要学习的就是这种特征),更多应该概率句子内部(单个样本内部)维度的归一化。
可以看作另外一个问题进行回答:为什么图像处理用batch normalization效果好,而自然语言处理用 layer normalization好?
CV使用BN是认为不同卷积核feature map(channel维)之间的差异性很重要,LN会损失channel的差异性,对于batch内的不同样本,同一卷积核提取特征的目的性是一致的,所以使用BN仅是为了进一步保证同一个卷积核在不同样本上提取特征的稳定性。
而NLP使用LN是认为batch内不同样本同一位置token之间的差异性更重要,而embedding维,网络对于不同token提取的特征目的性是一致的,使用LN是为了进一步保证在不同token上提取的稳定性。
如何选择Normalization?
扩展总结一下如何选择Normalization方式:
取决于关注数据的哪部分信息。如果某个维度的信息差异很重要,需要被拟合,这个维度就不能进行归一化。
参考文献
transformer 为什么使用 layer normalization,而不是其他的归一化方法?-佳雨
transformer 为什么使用 layer normalization,而不是其他的归一化方法?-Leo
各种归一化层(BatchNorm、LayerNorm、InstanceNorm、GroupNorm、Weight Standardization)及其Pytorch实现